

![[LabVIEW] Data 변환 프로그램](https://scvkorea.com/wp-content/uploads/2026/04/DATA변환.png)
1. 프로젝트 개요
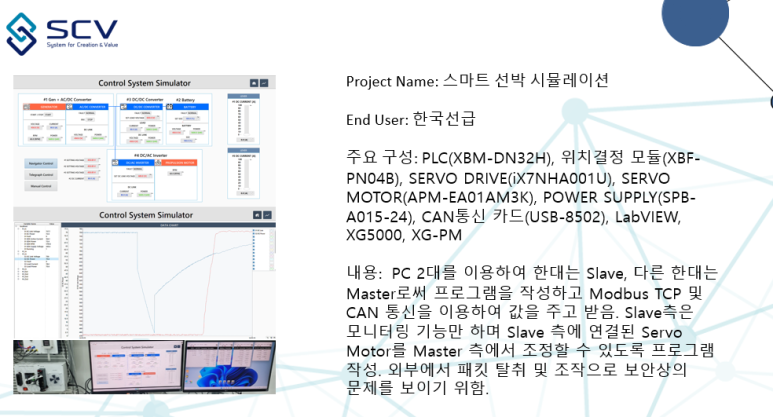
본 시스템은 PC 2대 기반의 Master–Slave 구조로 구성됩니다.
Master PC, Modbus TCP 및 CAN 통신을 통해 제어 명령 송신, Slave 측에 연결된 Servo Motor를 원격 제어, Slave PC, 시스템 상태 및 신호에 대한 모니터링 전용 기능 수행, 실제 제어 대상(서보 모터 및 PLC I/O)와 직접 연결, 양측은 Modbus TCP와 CAN 통신을 통해 데이터를 주고받으며 선박 자동화 시스템에서 사용되는 분산 제어 구조를 모사합니다.
2. 시스템 구성 및 주요기능
2-1. 시스템 구성
- PLC(XBM-DN32H), 위치결정 모듈(XBF-PN04B)
- Servo Drive(iX7NHA001U), Servo Motor(APM-EA01AM3K)
- Power Supply(SPB-A015-24), CAN 통신 카드(USB-8502)
- LabVIEW, XG5000, XG-PM
2-2. 공정별 주요 기능
- 보안 시뮬레이션 목적
- 본 스마트선박 시뮬레이션은 외부에서의 패킷 탈취, 데이터 변조, 제어 신호 조작과 같은 산업 제어 시스템(ICS) 보안 위협 시나리오를 가시적으로 확인하는 데 목적이 있습니다. 이를 통해 다음과 같은 검증이 가능합니다.
- 제어 신호 탈취 시 서보 구동에 미치는 영향 확인
- 통신 구간 보안 미적용 시 발생 가능한 운용 리스크 시각화
- 스마트선박 자동화 시스템의 사이버 보안 취약점 분석
3. 기대 효과
스마트선박 제어 시스템의 통신 구조 이해도 향상과 실제 장비 기반의 보안 취약성을 확인할 수 있고 향후 보안 강화 설계 및 규격 수립을 하기 위한 기초 자료 확보가 가능할 것으로 보입니다.
디지털 트윈과는 다릅니다. 디지털 트윈은 현실 세계의 물리적 자산(설비, 시스템, 공정) 을 가상 공간에 동일하게 복제하고, 실시간 데이터로 상태·동작·거동을 동기화하는 기술입니다.
| 구분 | 일반 시뮬레이션 | 디지털 트윈 |
|---|---|---|
| 데이터 | 가정값·정적 | 실시간 실제 데이터 |
| 현실 반영 | 제한적 | 현실과 동기화 |
| 활용 | 설계 단계 | 운영·유지보수·보안까지 |
| 제어 | 없음 또는 제한 | 실시간 제어 가능 |
카테고리 & 태그
ㅤ
글 상세정보
ㅤ
Previous Post
Next Post
관련 포스트
ㅤ
-

반도체, ADAS(첨단 운전자 보조 시스템) 및 전기차의 시너지 효과: 공급망 혁신의 새로운 시대
전기 자동차의 급증으로 보다 효율적인 전력 전자 장치에 대한 수요가 증가하고 있습니다. 고성능 분야에서는 실리콘에서 와이드 밴드갭으로 크게 변화하고 있지만, SiC 및 GaN 전력 반도체는 신뢰성 테스트 및 검증에 새로운 과제를 안겨줍니다. 실제 조건을 시뮬레이션하고 결함으로 인한 새로운 파급 효과를 감지하려면 사용 분야에 특화된 새로운 동적 테스트 방법이 필요합니다. 엔지니어는 제품 검증을 위해 AQG324, AECQ…
-

답글 남기기